 Dépliage
Dépliage


 Alvéole
Alvéole

 Projecteur UV
Projecteur UV

Physique élémentaire
Algorithmes de physique élémentaire en 2D
Sans transition
// Boucle
cible = sourisTransition progressive
Rapidité
// Initialisation
cible = souris// Boucle
cible += (souris - cible) * rapiditeTransition élastique
Rapidité
Élasticité
Élasticité
// Initialisation
cible = souris
vitesse = 0// Boucle
vitesse = (vitesse + (souris - cible) * rapidite) * elasticite
cible += vitesseSuivi rigide
// Boucle
direction = (cible - souris).getNormalized()
cible = souris + direction * longueurSuivi souple
// Boucle
difference = cible - souris
longueurDiff = difference.getLength()
direction = Vector()
if (longueurDiff > 0) direction = difference / longueurDiff
longueurCible = longueur
if (longueur > longueurDiff) longueurCible = longueurDiff;
cible = souris + direction * longueurCibleSuivi rigide élastique
// Initialisation
cible = souris
vitesse = 0// Boucle
direction = (cible - souris).getNormalized()
destination = souris + (direction * longueur)
vitesse = (vitesse + (destination - cible) * rapidite) * elasticite
cible += vitesseGravité et inertie
// Initialisation
cible = souris
vitesse = 0// Boucle
destination = cible + vitesse + gravite
vitesse = destination - cible
vitesse *= friction
cible = destinationLiaison souple avec inertie et gravité
// Initialisation
cible = souris
vitesse = 0
attache = true// Boucle
destination = cible + vitesse + gravite
difference = destination - souris
longueurDiff = difference.getLength()
if (attache && longueurDiff >= longueur) {
direction = difference.getNormalized()
destination = souris + (direction * longueur);
}
vitesse = destination - cible
vitesse *= friction
cible = destinationLiaison avec inertie, masse et gravité
// Initialisation
cible = souris
vitesse = 0
attache = true// Boucle
destination = cible + vitesse + gravite
difference = destination - souris
longueurDiff = difference.getLength()
deplacement = (cible - destination).getNormalized()
destinationLiee = destination
if (attache && longueurDiff >= longueur) {
direction = difference.getNormalized()
destinationLiee = souris + (direction * longueur);
}
liaison = destinationLiee - destination
destination += liaison
vitesse = destination - cible
inertie = vitesse.getNormalized() * masse * (deplacement • liaison)
vitesse += inertie
vitesse *= friction
cible = destinationLiaison élastique avec inertie et gravité
// Initialisation
cible = souris
vitesse = 0
attache = true
elasticiteVitesse = 0// Boucle
destination = cible + vitesse + gravite
difference = destination - souris
longueurDiff = difference.getLength()
if (attache && longueurDiff >= longueur) {
direction = difference.getNormalized()
destinationLiee = souris + (direction * longueur)
liaison = destinationLiee - destination
elasticiteVitesse += liaison * elasticite
elasticiteVitesse *= rapidite
destination += elasticiteVitesse
}
vitesse = destination - cible
vitesse *= friction
cible = destinationCorde avec inertie et gravité
// Initialisation
attache = true
points = [
{ x : 0, y : 0 },
{ x : 20, y : 0 },
{ x : 40, y : 0 },
{ x : 60, y : 0 },
{ x : 80, y : 0 },
{ x : 100, y : 0 },
{ x : 120, y : 0 },
{ x : 140, y : 0 },
{ x : 160, y : 0 },
{ x : 180, y : 0 },
{ x : 200, y : 0 },
{ x : 220, y : 0 },
{ x : 240, y : 0 },
{ x : 260, y : 0 },
]
// Liens de chaque point (exemple : le point 1 est lié au point 0 et au point 2).
// Les longueurs pourraient être factorisées pour gagner en mémoire
liens = [
[{ 'id' : 1, 'long' : 20 }],
[{ 'id' : 0, 'long' : 20 }, { 'id' : 2, 'long' : 20 }],
[{ 'id' : 1, 'long' : 20 }, { 'id' : 3, 'long' : 20 }],
[{ 'id' : 2, 'long' : 20 }, { 'id' : 4, 'long' : 20 }],
[{ 'id' : 3, 'long' : 20 }, { 'id' : 5, 'long' : 20 }],
[{ 'id' : 4, 'long' : 20 }, { 'id' : 6, 'long' : 20 }],
[{ 'id' : 5, 'long' : 20 }, { 'id' : 7, 'long' : 20 }],
[{ 'id' : 6, 'long' : 20 }, { 'id' : 8, 'long' : 20 }],
[{ 'id' : 7, 'long' : 20 }, { 'id' : 9, 'long' : 20 }],
[{ 'id' : 8, 'long' : 20 }, { 'id' : 10, 'long' : 20 }],
[{ 'id' : 9, 'long' : 20 }, { 'id' : 11, 'long' : 20 }],
[{ 'id' : 10, 'long' : 20 }, { 'id' : 12, 'long' : 20 }],
[{ 'id' : 11, 'long' : 20 }, { 'id' : 13, 'long' : 20 }],
[{ 'id' : 12, 'long' : 20 }],
]
// Vitesse des points
vitesses = [
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
]
// Position des points avant le calcul de la liaison
pointsAvantLiaisons = [
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
]
// Position finale des points
pointsApresLiaisons = [
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
{ x : 0, y : 0 },
]// Boucle
nb = points.length;
// Forces
for (i = 0 ; i < nb ; i++) {
pointsAvantLiaisons[i] = points[i] + vitesses[i] + gravite
if (i === 0 && attache) {
points[i] = souris
pointsAvantLiaisons[i] = souris
}
}
// Liaisons
for (k = 0 ; k < 20 ; k++) { // 20 = itérations pour l'approximation du calcul des liaisons
for (i = 0 ; i < nb ; i++) {
pointAvantLiaisons = pointsAvantLiaisons[i]
liensPoint = liens[i]
pointAvecLiaison = { x : 0, y : 0 }
direction = { x : 0, y : 0 }
liaison = { x : 0, y : 0 }
liaisonMoyenne = { x : 0, y : 0 }
liensNb = liensPoint.length
for (lien in liensPoint) {
lienPoint = pointsAvantLiaisons[lien.id]
direction = pointAvantLiaisons - lienPoint
direction.normalize()
pointAvecLiaison = lienPoint + direction * lien.long
liaison = pointAvecLiaison - pointAvantLiaisons
liaisonMoyenne += liaison
}
if (liensNb > 0) {
liaisonMoyenne /= liensNb
pointsApresLiaisons[i] = pointAvantLiaisons + liaisonMoyenne
}
if (i === 0 && attache) {
pointsApresLiaisons[i] = souris
}
}
for (i = 0 ; i < nb ; i++) {
pointsAvantLiaisons[i] = pointsApresLiaisons[i]
}
}
// Finalisation
for (i = 0 ; i < nb ; i++) {
pointApresLiaisons = pointsApresLiaisons[i]
vitesses[i] = pointApresLiaisons - points[i]
points[i] = pointApresLiaisons;
}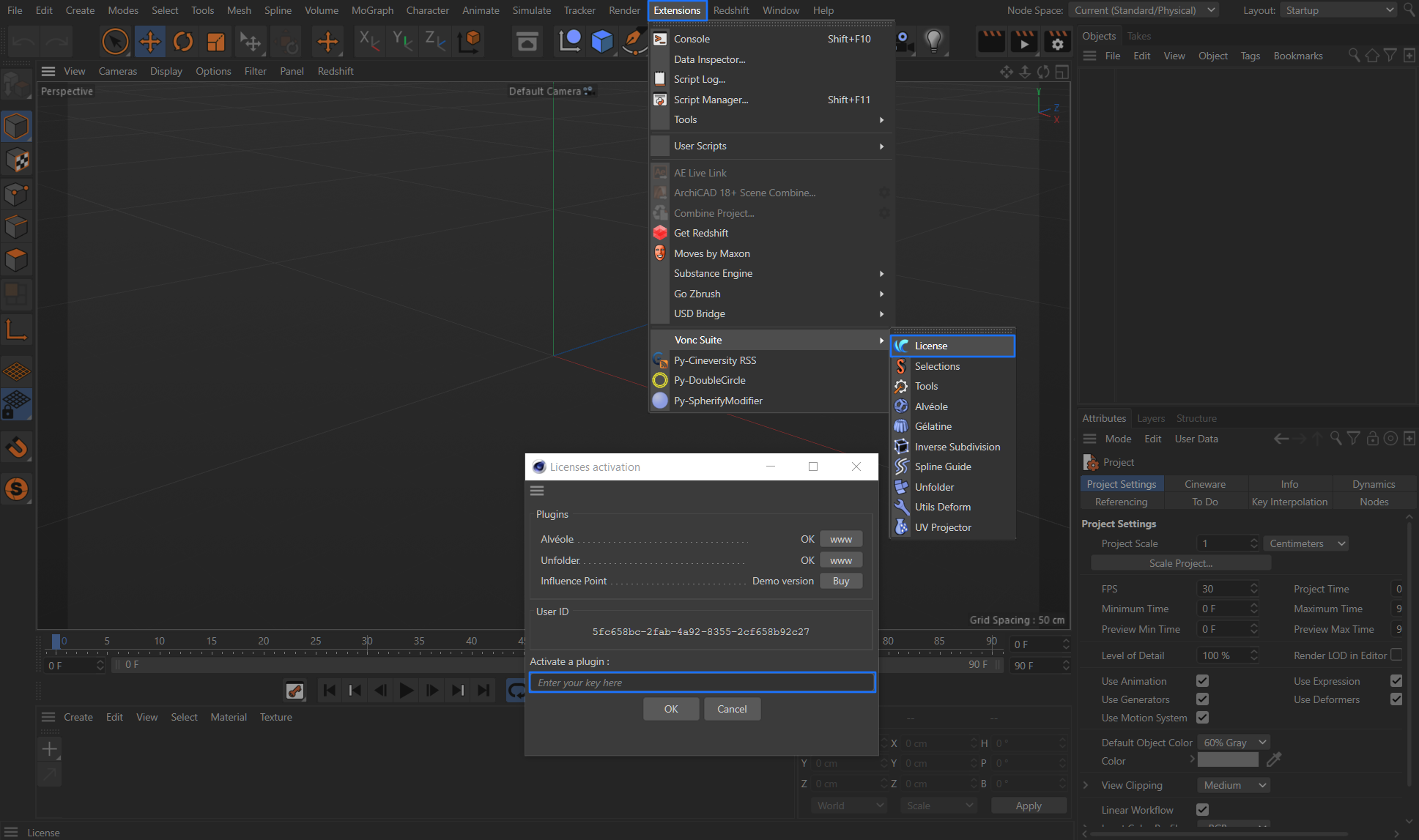
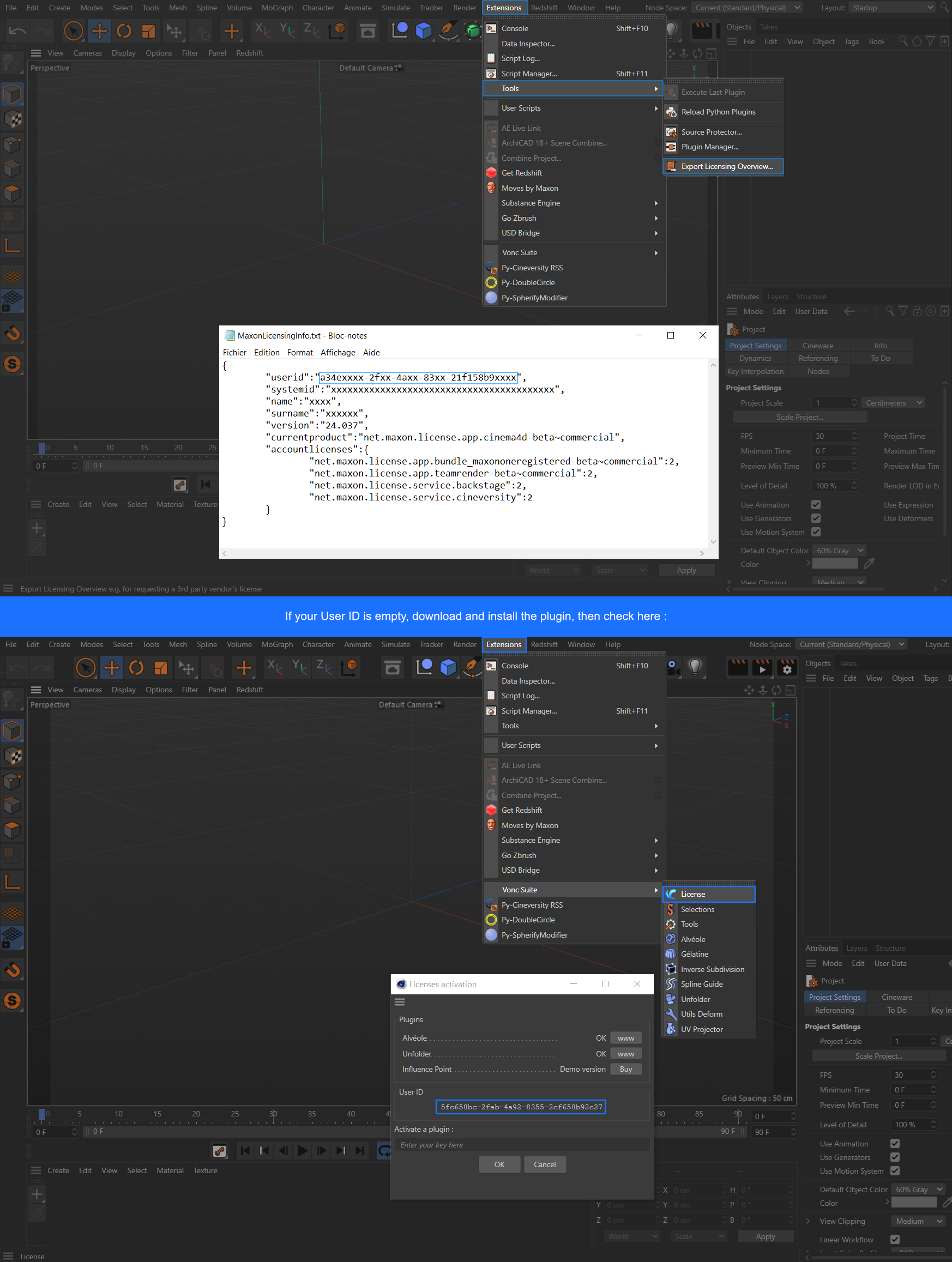
keyboard_arrow_down